The Mediator system generally focusses on all driving scenarios with vehicles up to SAE level 5 automation. To develop and evaluate the Mediator system within the MEDIATOR project however, this scope will need to be reduced. For this purpose, a set of use cases was defined in the beginning of the project.
During the first advisory board meeting several board members indicated that the MEDIATOR project should focus more on common driving scenarios and less on, often rare, extreme scenarios, such as emergency stops. While the system should also be able to deal with such extreme situations, a more important goal of the Mediator system is to prevent any unsafe situations and improve the driver experience and safety all throughout their driving trips. The selected use cases therefore cover a range of both take over situations and situations while driving with a specific level of automation where prevention of unsafe situations is the main goal. Another important take away from the advisory board meeting was to focus on the driver needs and capabilities. Where current vehicle automation is often designed from an engineering perspective where the driver serves as a back up to the automation, the Mediator system should instead assume the automation to be a back up for the driver. For this reason, some of the use cases also focus specifically on situations where the Mediator system can increase driver comfort.
The commonly used SAE levels of automation describe automation levels from an engineering perspective. MEDIATOR instead approached the SAE levels of automation from a human centered perspective. The defined use cases instead focus on three levels of automation which were not based on mainly technological differences in vehicle automation but differences that are relevant from a human driver perspective. During the lowest automation level, “Continuous Mediation" (CM) , the driver is expected to be alert at all times, but can make use of automation systems to help with the driving task. This level includes driving with both SAE level 1 and 2. Driving with the automation level “driver in Stand By (SB)”, the driver can focus on secondary tasks for short periods of time, but should be aware that requested to take back control can occur on short notice. This level includes driving with SAE level 3 and 4 automation systems that are reliable for shorter periods of time. Finally, when driving with “Time to Sleep (TtS)” the driver can be out of the loop for longer periods of time and is even allowed to sleep, knowing that the automation will alert the driver well in time to comfortable wake up and take back control. This level includes mainly SAE level 4 systems.
Ten use cases (UC) corresponding to either switching between or driving with these newly defined levels of automation are presented. Take overs with a strong focus on safety (shown in red) include switching from manual driving to driving with SB (UC 1), switching from either CM or SB to manual driving (UC 9 and 5) or switching between TtS and SB (UC 10). Additionally, UC 5 includes take overs on short and more comfortable notice. While driving with automation (shown in green) in levels CM or SB the Mediator system can detect degraded driver performance and initiate a corrective action, which is covered in UC 4 and 8, respectively. A separate use case (UC 7) deals with preventing any driver degraded performance. This use case mainly focusses on driving with CM, but can also be applied to driving with SB. Finally, three of the use cases deal with comfort related take overs (shown in blue). A driver initiated take over while driving with SB is described by UC 2. Take overs to automation levels CM or SB, either initiated by the driver or proposed by the Mediator system, are covered with UC 6 and 3, respectively.
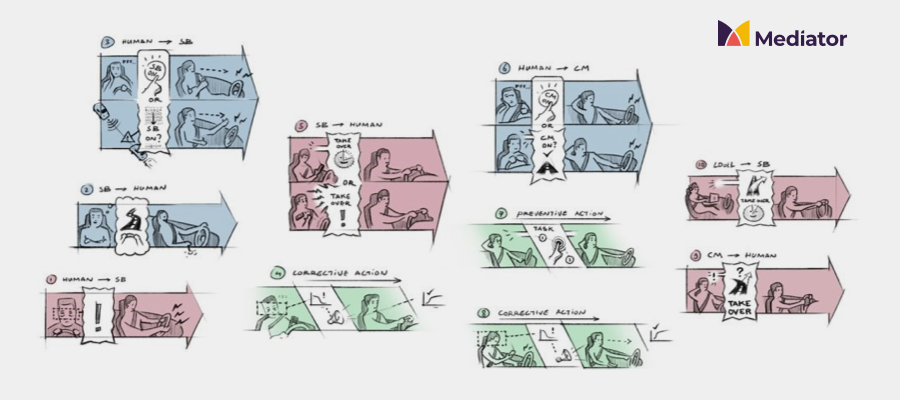
UC 1: MEDIATOR initiated take over Human -> Automation:
MEDIATOR detects degraded human fitness caused by A). drowsiness B). distraction, and initiates a forced take over to automation. 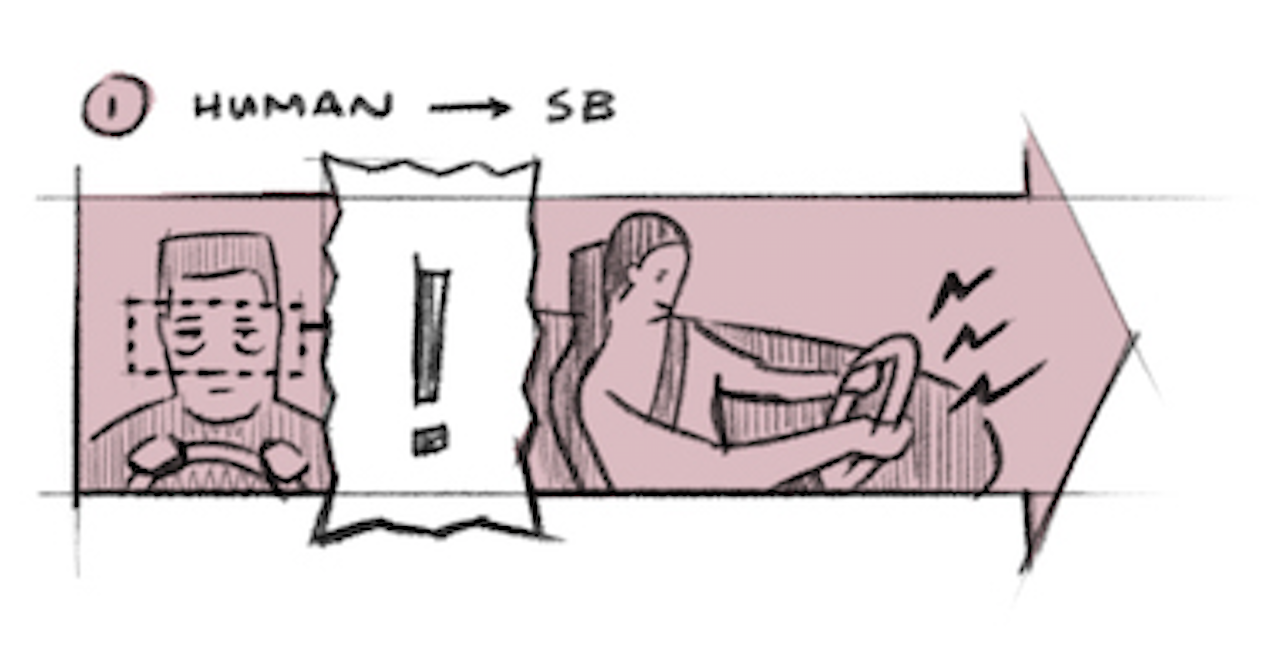
UC 2: Automation -> Human:
Driver takes back control: the human driver inidcates a desire to take back control via the HMI. 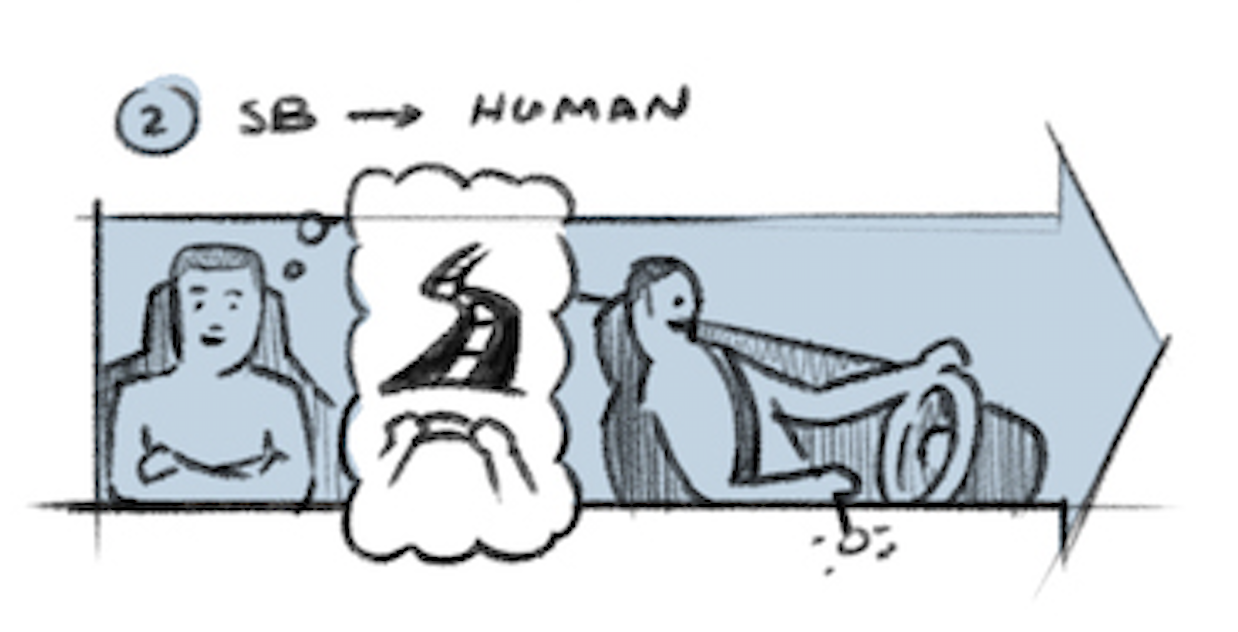
UC 3: Comfort take over Human -> Automation:
A). Driver initiated: driver is not motivated to drive and indicated a preference for automation to drive via the HMI.
B). Mediator initiated: Mediator detects an event (such as a text message or an upcoming traffic jam and used historical date to conclude that the driver would likely want to hand over control. Mediator proposes the Human --> Automation take over.
UC 4: Corrective Mediator action during standby: the human gets drowsy while expected to be on standby.
Mediator tries to improve the driver fitness and monitor the effect. 
UC 5: Mediator initiated take over Automation -> Human:
A). Planned: the automation communicates that the current route will leave the ODD within the next seconds.
B). Unplanned: the automation communicates that its reliability is degrading rapidly and the human should take over within seconds. Mediator informs the human and guides an urgent take over. 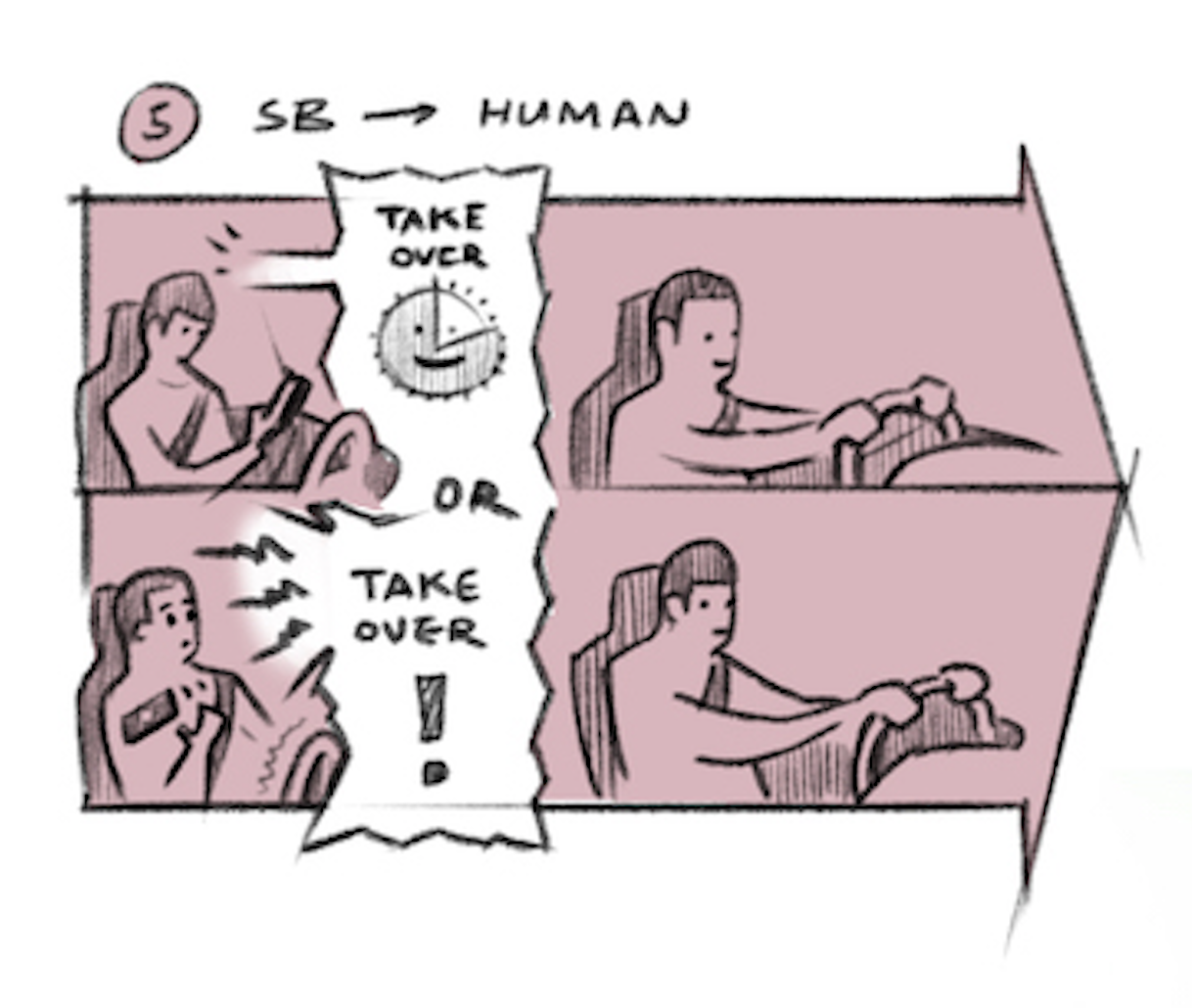
UC 6: Comfort CM switch on:
A). Driver initiated: Human is not motivated to drive fully manually and indicated this via the HMI.
B). Mediator initiated: Mediator detects reliable automation and uses historical data to conclude that the human likely preferes to activate partial automation. 
UC 7: Prevention – CM Keep the driver in the loop:
While driving with L2 automation, Mediator tries to prevent underload of the human driver and keep him/her in the loop by providing an active task. What this task will entail is one of the research questions. 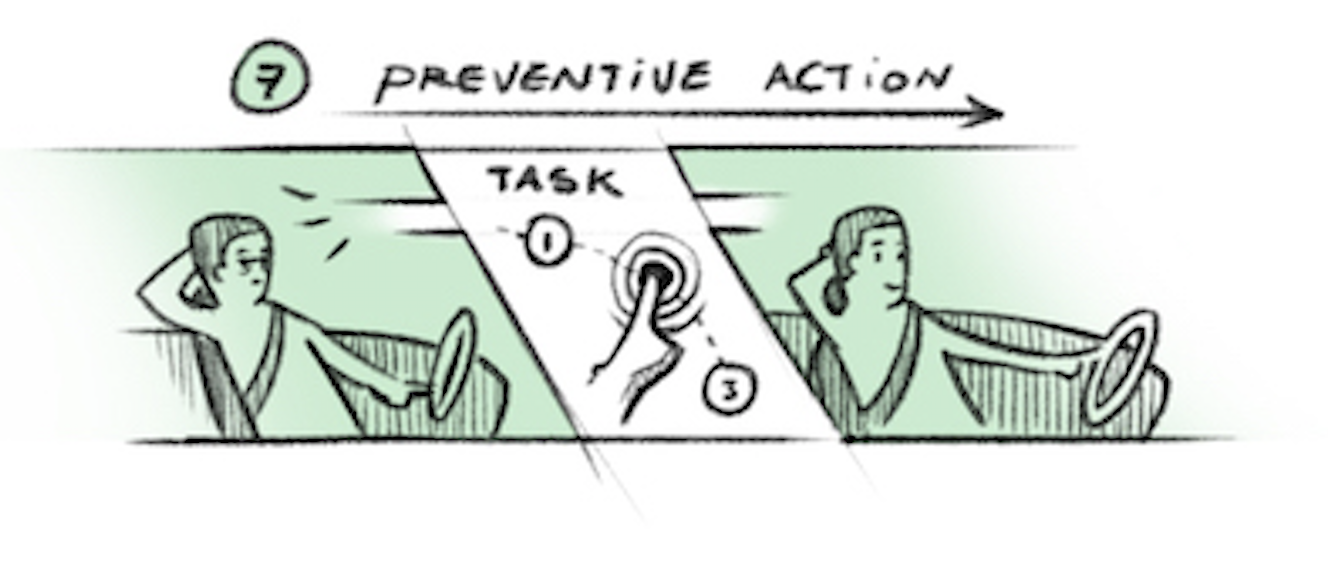
UC 8: Corrective – CM Get the driver back into the loop:
While driving with L2 automation drowsiness or distraction is detected. Mediator initiates a correction action such as a voice message to get the driver back in the loop. 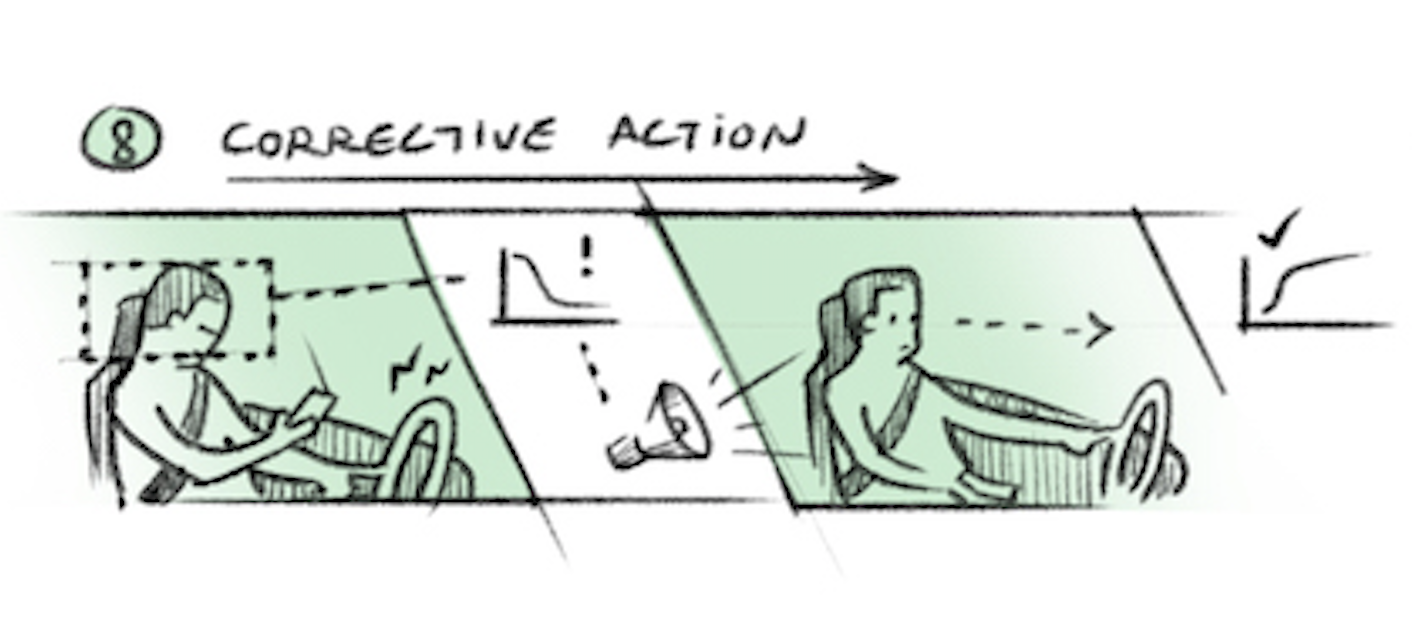
UC 9: CM shuts off immediately:
While driving with L2 automation the road markings degrade and Mediator indicates L2 will shut off immediately. 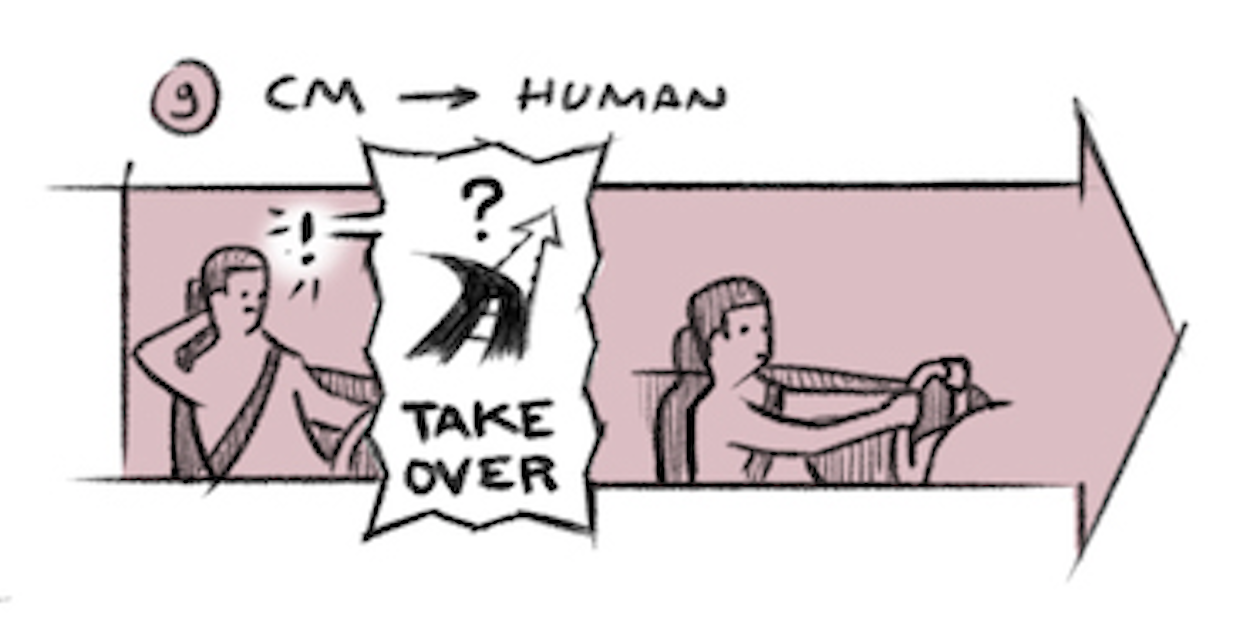
UC 10: Smooth transition from Time to Sleep to Stand By:
The driver is fully out of the loop while driving on the highway with L4 automation when the route is approaching a highway exit. Mediator informs the driver that the standby mode (L3) will be switched on and monitors the driver fitness for this standby task. 
Currently, vehicle automation related research projects often focus on very specific extreme situations and designs generally take the automation capabilities as a starting point. The use case selection for the MEDIATOR project instead focussed on driver needs in every day driving. This resulted in a different take on the levels of automation and a project scope that encompasses a large part of the driving scenario’s drivers will deal with daily. For this reason it is also expected that, if the final Mediator system is validated for this set of use cases, any market ready version of the Mediator system will also have a big chance of gaining user acceptance and improving safety. The presented use cases and automation levels can serve as an example for others to refocus their vehicle automation projects and designs towards systems made for and accepted by humans.
