MEDIATOR is developing a system that mediates between human drivers and vehicle automation to ensure safe, real-time switching between the two, based on who is fittest to drive and drivers’ preference. The Mediator system exists of four main components that have been developed that are currently being tested. Previously, we described the driver state component, the automation state component, and the human-machine interface (HMI). Now we briefly present the central decision logic. Its development is being led by Cygnify, The Netherlands, with contributions from many consortium partners.
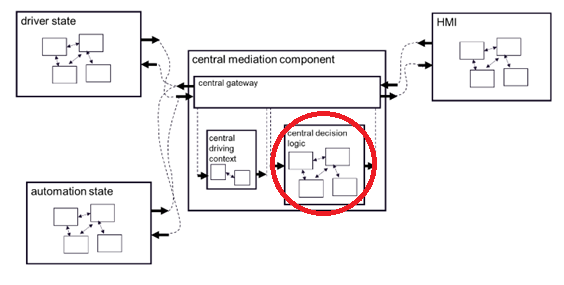
The central decision logic in the overall Mediator architecture
The central decision logic is the main part of the central mediation component. It is responsible for the weighing of the driver and automation states and using the information about the driver context. The central decision logic is based on continuous input from and feedback loops to each of the other main components. It decides who is fittest to drive, and selects the corresponding mediation actions, taking account of driver comfort requirements. It then communicates the decisions to the other modules, in particular to the HMI module, and receives feedback about the executed actions as a basis for follow-up decisions.
Several roles
Based on the integration of the information from the driver and automation state components as well as the driving context, the central decision logic fulfils several roles:
- It recommends or imposes switches (transition of control) between human driver and vehicle automation, distinguishing different levels of urgency.
- It triggers corrective actions for ‘fixing’ a degraded driver, based on detection of distraction, fatigue and discomfort.
- It enforces emergency actions if needed, such as emergency stops.
- It ensures that the HMI component receives the necessary information to be communicated to the driver.
A more extensive description of the functions of the decision logic and related functional requirements is available in Deliverable 1.4.
The decision logic was elaborated into concrete, discrete actions. For example, for the transition of control several actions were distinguished such as a suggested level shift and an enforced level shift. In both cases, the decision is accompanied by the desired or available timeline for the transition of control. In addition, in case a driver is out of the loop (driving at a high level of automation) while a transition of control is needed, the decision logic ensures that the HMI warns the driver in time to be prepared to take over control.
AI algorithms and decision trees
The decision logic is largely based on artificial intelligence (AI) algorithms. These algorithms assess if and when an action, such as a transition of control or a corrective action, should be executed. An additional execution and monitoring function is responsible for the actual execution of the identified actions and for monitoring whether they are successful.
The current main algorithms for the decision making are based on decision trees together with additional logic for determining priorities, and for starting, monitoring, and interrupting action execution. The decisions derived from the decision tree are expressed using IF-THEN statements, i.e., IF condition THEN conclusion. Checking whether the IF-part requirements have been met is based on the information from each of the other Mediator components. Part of the required information is already collected and calculated in the Driver State and Automation State components. As they use the same type of expressions (Time to Driver or Automation Fitness/Unfitness), the decision logic can simply make use of their output. In addition, the hierarchical and modular structure of the decision tree allows for higher order priority decisions and subsequent the appropriate lower order action selection. In addition, the modular structure allows for relatively easy updates of the decision trees, for example to accommodate for updated models of fatigue or distraction.
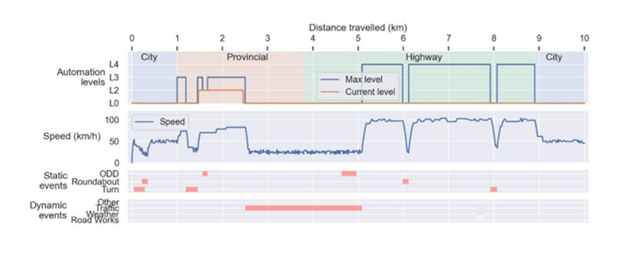
Preliminary computer testing
Using a computer simulation environment, the decision logic was tested along 10,000 runs with randomly generated roads, route lengths, static/dynamic road events and driver events. The figure below shows the core elements of the computer simulation runs, with locations, speeds, and events over time.
To compare the performance with and without Mediator support, the decision logic was sometimes partially deactivated. This is known as an ablation study. For instance, the element that deals with driver distraction was removed and the performance compared with the performance of the full system, as a kind of baseline. For the testing, one function at a time was removed: distraction, fatigue, automation degradation, et cetera. The computer simulations showed that the Mediator decision logic substantially improved performance, compared to the baseline situation. Performance criteria included safety (e.g., number and duration of events with an unfit driver or unfit car), comfort (e.g., number of emergency stops and number of quick takeovers) and actions (e.g., number of actions per 100 km and the average time between actions).
Driving simulation and field trials
Currently several parts of the Mediator system are being evaluated in driving simulator and experimental field studies, each with their own focus of interest. For evaluating the decision logic, a field trial in real, everyday traffic conditions is crucial. This is currently being realised by the Veoneer MEDIATOR vehicle prototype; and for this, a specially adapted version of the decision logic was developed. This evaluation concerns many hours of driving by (professional) drivers in real-world circumstances with a full Mediator system, including the decision logic component. The evaluation will not just provide feedback on the technical functioning, but also on the experiences of the drivers as an indication of acceptance, comfort and reasonability in practice. Results are expected to be available early 2023.

